
第一章 计算机系统概论
计算机发展历程
计算机的四代发展
- 第一代(1945-1955)
- 特征:电子管、插板式编程
- 编程方式:机器语言
- 主要用途:数值计算
- 第二代(1955-1965)
- 特征:晶体管、批处理系统
- 编程方式:汇编语言、FORTRAN
- 代表机型:IBM 7094
- 第三代(1965-1980)
- 特征:集成电路、多道程序、分时系统
- 编程方式:高级语言(BASIC、C)
- 技术创新:多道程序设计、分时处理
- 第四代(1980-至今)
- 特征:超大规模集成电路
- 发展方向:
- 个人计算机
- 并行计算
- 分布式系统
- 云计算
计算机系统的层次结构
计算机系统的五个层次
- 高级语言层(M4)
- 汇编语言层(M3)
- 操作系统层(M2)
- 机器语言层(M1)
- 微程序层(M0)
性能指标
主要性能指标
CPI(Cycles Per Instruction)
-
基本公式 / Basic Formula
- 中文:
CPI = 总时钟周期数 / 总指令数 - English:
CPI = Total Clock Cycles / Total Instructions
表示为数学公式 / Mathematical expression: $CPI=\frac{Clock Cycles}{Instruction Count}$
- 中文:
-
加权平均公式 / Weighted Average Formula
当有多种类型的指令时 / When there are multiple instruction types:
$CPI=\sum_{i=1}^{n}(CPI_i×F_i)$
MIPS(Million Instructions Per Second)
- 基本公式 / Basic Formula
$MIPS=\frac{指令数执行}{时间×10^6}=\frac{时钟频率}{CPI×10^6}$
英文表示 / In English: $MIPS=\frac{Instruction Count}{Execution Time×10^6}=\frac{Clock Frequency}{CPI×10^6}$
- 扩展公式 / Extended Formula
当已知时钟频率(Hz)和CPI时:/ When clock frequency (Hz) and CPI are known:
$MIPS=\frac{Clock Frequency (Hz)}{CPI×10^6}$
重要例题分析
例题1: CPI计算
|
|
例题2: CPU性能计算
$$ N=t\times f $$- N:时钟周期总数
- t:运行时间
- f:频率
|
|
例题3: MIPS计算
|
|
冯·诺依曼计算机的基本特点
- 五大部件
- 运算器(ALU)
- 控制器(CU)
- 存储器(Memory)
- 输入设备(Input)
- 输出设备(Output)
- 重要特征
- 计算机由五大部件组成
- 指令和数据以二进制表示
- 指令和数据存放在同一存储器中
- 指令由操作码和地址码组成
- 存储程序
- 按地址访问
第二章 计算机数据表示
数据表示基础
为什么使用二进制
- 易于实现:只有0和1两种状态
- 抗干扰能力强
- 便于逻辑运算
- 硬件实现简单
数据表示考虑因素
- 数据类型(数值/非数值)
- 表示范围和精度
- 存储和处理代价
- 软件可移植性
数值数据表示
机器数的编码方式
- 原码
- 反码
- 补码
- 移码
原码
-
最高位为符号位(0正1负)
-
其余位是数值的绝对值
-
公式:
$$ [X]_{\text{原}} = \begin{cases} X, & 0 \leq X < 2^n \\ 2^n - |X|, & -2^n < X \leq 0 \end{cases} $$
反码
-
正数的反码与原码相同
-
负数的反码是对原码除符号位外各位取反
-
公式:
$$ [X]_{\text{反}} = \begin{cases} X, & 0 \leq X < 2^n \\ 2^{n+1}-1 + X, & -2^n < X \leq 0 \end{cases} $$
补码
-
正数的补码与原码相同
-
负数的补码是在反码的基础上末位加1
-
公式:
$$ [X]_{\text{补}} = \begin{cases} X, & 0 \leq X < 2^n \\ 2^{n+1} + X, & -2^n < X \leq 0 \end{cases} $$
移码
- 常用于表示浮点数的阶码
- 公式:
$[x]_移 = x + 2^{n-1}$ - 与补码的关系:符号位取反其余位不变
例题
示例1:将十进制数 +52 转换为8位二进制机器码
- 原码
- 正数,符号位为0
- 52的二进制为110100
- 8位原码表示:
0110,1000
- 反码
- 正数的反码等于原码
- 所以反码也是:
0110,1000
- 补码
- 正数的补码等于原码
- 所以补码也是:
0110,1000
示例2:将十进制数 -52 转换为8位二进制机器码
-
原码
- 负数,符号位为1
- |52|的二进制为110100
- 8位原码表示:
1110,1000
-
反码
-
负数,符号位为1
-
数值位按位取反
-
计算过程
1 2原码:1110,1000 数值位取反:1001,0111
-
-
补码
-
负数,在反码基础上末位加1
-
计算过程
1 2反码:1001,0111 末位加1:1001,1000
-
转换口诀
- 正数:原码 = 反码 = 补码
- 负数:
- 原码:符号位为1,其余为绝对值的二进制
- 反码:符号位为1,数值位按位取反
- 补码:反码末位加1
整型和浮点型表示
整型
整型在计算机中使用补码表示
|
|
浮点数
$$ V=(-1)^s \times M \times 2^E $$其中:
- S:符号位(0正1负)
- M:1.尾数(规范化的尾数)
- E:指数值(减去偏置值的指数)
例子:存储float类型的12.375
-
转换为二进制:
1 2 312 = 1100(二进制) 0.375 = 0.011(二进制) 12.375 = 1100.011(二进制) -
规范化:
11100.011 = 1.100011 × 2^3 -
存储格式:
1 2 3 4 5符号位(S):0(正数) 指数位(E):3 + 127(偏置) = 130 = 10000010 尾数位(M):100011(不存储小数点前的1) 最终存储:0 10000010 10001100000000000000000
字节序
- 大端序(Big Endian):高位字节存储在低地址
- 小端序(Little Endian):低位字节存储在低地址
|
|
数据校验
码距
- 码距是指两个等长编码之间不同位的个数
- 最小码距是指一个编码系统中任意两个合法编码之间的最小距离
|
|
奇偶校验
偶校验 / Even Parity
- 原理:确保数据位中"1"的总数(包括校验位)为偶数
- 校验位设置:如果数据位中"1"的个数为奇数,则校验位设为1;如果为偶数,则设为0
奇校验 / Odd Parity
- 原理:确保数据位中"1"的总数(包括校验位)为奇数
- 校验位设置:如果数据位中"1"的个数为偶数,则校验位设为1;如果为奇数,则设为0
海明码
校验码位置
- 校验位放在2的幂次位置上(1,2,4,8,…)
- 数据位放在其他位置上
|
|
校验码数量
对于k位数据,需要r位校验位,满足:
$$ 2^r ≥ k + r + 1 $$校验码负责校验的位置
p1(位置1): 检查二进制第1位为1的位置
|
|
p2(位置2): 检查二进制第2位为1的位置
|
|
p3(位置4): 检查二进制第3位为1的位置
|
|
校验码的值
校验码就是在负责校验位置上的偶校验
对单个错误进行纠错
计算综合征
- 第一位综合征(s1)
- 检查所有奇数位置的位
- s1 = p1 ⊕ d1 ⊕ d2 ⊕ d4
- 第二位综合征(s2)
- 检查位置2,3,6,7的位
- s2 = p2 ⊕ d1 ⊕ d3 ⊕ d4
- 第三位综合征(s3)
- 检查位置4,5,6,7的位
- s3 = p3 ⊕ d2 ⊕ d3 ⊕ d4
以此类推
综合征含义
|
|
以此类推
例题 海明码实例:4位数据的(7,4)海明码
-
原始数据
假设要传输的数据是:1011
-
生成海明码
-
确定位置
1 2 3 4 5位置: 1 2 3 4 5 6 7 用途: p1 p2 d1 p3 d2 d3 d4 数据: p1 p2 1 p3 0 1 1 ^ ^ ^ ^ ^ ^ ^ 二进制: 001 010 011 100 101 110 111 -
计算校验位
- 计算p1(检查1,3,5,7位)
- p1 ⊕ d1 ⊕ d2 ⊕ d4 = 0
- p1 ⊕ 1 ⊕ 0 ⊕ 1 = 0
- p1 = 1 ⊕ 0 ⊕ 1 = 0
- 计算p2(检查2,3,6,7位)
- p2 ⊕ d1 ⊕ d3 ⊕ d4 = 0
- p2 ⊕ 1 ⊕ 1 ⊕ 1 = 0
- p2 = 1 ⊕ 1 ⊕ 1 = 1
- 计算p3(检查4,5,6,7位)
- p3 ⊕ d2 ⊕ d3 ⊕ d4 = 0
- p3 ⊕ 0 ⊕ 1 ⊕ 1 = 0
- p3 = 0 ⊕ 1 ⊕ 1 = 0
- 计算p1(检查1,3,5,7位)
-
最终海明码
1 2位置: 1 2 3 4 5 6 7 数据: 0 1 1 0 0 1 1完整的海明码是:0110011
-
-
错误检测示例
3.1 假设第5位发生错误
接收到的错误数据:0110111(第5位从0变成了1)
3.2 计算综合征
- 计算s1(检查1,3,5,7位)
- 0 ⊕ 1 ⊕ 1 ⊕ 1 = 1
- 计算s2(检查2,3,6,7位)
- 1 ⊕ 1 ⊕ 1 ⊕ 1 = 0
- 计算s3(检查4,5,6,7位)
- 0 ⊕ 1 ⊕ 1 ⊕ 1 = 1
3.3 错误定位
- 得到的综合征:101
- 对照综合征表:101 表示第5位出错
- 将第5位取反即可纠正错误
3.4 纠错结果
1 2 3错误数据: 0 1 1 0 1 1 1 纠正后: 0 1 1 0 0 1 1 位置: 1 2 3 4 5 6 7 - 计算s1(检查1,3,5,7位)
-
验证正确性
4.1 重新检验
计算三个校验方程:
- s1 = 0 ⊕ 1 ⊕ 0 ⊕ 1 = 0
- s2 = 1 ⊕ 1 ⊕ 1 ⊕ 1 = 0
- s3 = 0 ⊕ 0 ⊕ 1 ⊕ 1 = 0
所有校验方程结果都为0,说明纠错成功。
4.2 提取原始数据
- 取出数据位(第3,5,6,7位):1011
- 与原始数据相同,验证成功
CRC循环冗余校验
校验流程
-
确定CRC位数(r)
应满足:$2^r>数据长度+r$
-
选择合适的CRC标准
- CRC-16
- 生成多项式:$x^{16}+x^{15}+x^{2}+1$
- 广泛应用于USB、Modbus等协议
- CRC-32
- 生成多项式:$x^{32}+x^{26}+x^{23}+x^{22}+x^{16}+x^{12}+x^{11}+x^{10}+x^{8}+x^7+x^5+x^4+x^2+x+1$
- 用于以太网、ZIP文件等
- CRC-8
- 生成多项式:$x^8+x^7+x^6+x^4+x^2+1$
- 用于简单的数据校验
- CRC-4
- 生成多项式:$x^3+x+1$
- CRC-16
-
数据预处理
补零操作(补生成多项式度数-1个零),并接到原数据后面
-
求余数
用补完0的数除以生成多项式的二进制表示来求得余数,并将余数替换后面补的0
-
判断是否正确
通过传入的数除以CRC方法对应的多项式来判断是否正确,余0表示正确
CRC循环校验的优势和劣势
优势
- 能够检测所有单比特错误
- 能够检测所有双比特错误
- 能够检测大多数突发错误
- 能检测所有奇数个数错误
劣势
- 无法纠错
- 存在理论上的盲区
例题 CRC计算
题目:数据1100,生成多项式G(x)=1011,求CRC码。
步骤:
-
数据左移3位:1100000
-
模2除法:
1 2 3 4 5 6 7 8 9 101100000÷1011 1011 ----- 1110 1011 ----- 1010 1011 ----- 0010 (余数) -
CRC码:1100010
第三章 运算方法与运算器
定点加减法运算
补码加法运算 (Addition in Two’s Complement)
补码的加法非常直接,直接按位相加,溢出位舍弃。 Addition in two’s complement is straightforward - add bits directly and discard overflow.
例如 (Example):
|
|
补码减法运算 (Subtraction in Two’s Complement)
减法可以转换为加上负数的补码:A - B = A + (-B) Subtraction can be converted to adding the two’s complement of the negative number: A - B = A + (-B)
例如 (Example):
|
|
溢出检测 (Overflow Detection)
-
正溢出 (Positive Overflow)
两个正数相加,结果变成负数 When adding two positive numbers results in a negative number
-
负溢出 (Negative Overflow)
两个负数相加,结果变成正数 When adding two negative numbers results in a positive number
检测方法 (Detection Methods)
-
符号位进位法 (Sign Bit Carry Method)
观察最高位的进位和最高位前一位的进位,如果不同则发生溢出 Compare the carry into and out of the sign bit - if different, overflow occurred
-
符号位检查法 (Sign Bit Check Method)
检查两个操作数符号相同,但结果符号不同 Check if operands have the same sign but result has different sign
补码的加减法示例 (Examples)
让我们看一个具体的8位补码计算示例: Let’s look at an 8-bit two’s complement calculation example:
|
|
定点乘法运算
原码乘法运算
原码乘法运算和手算乘法的程序一样,都是各位相乘以后相加,不多做赘述
补码乘法运算(Booth算法)
补码乘法运算遵循以下法则:
- 对于乘数$x$被乘数$y$,分别求$[x]_补$、$[-x]_补$、$[y]_补$
- 初始化$A=0$,$Q=[y]补$,$Q{-1}=0$
- 进行如下循环操作:
- 比较Q0和Q(-1),根据结果进行操作:
- 若$Q_0Q_{-1}=00或11$,$AQQ_{-1}$右移
- 若$Q_0Q_{-1}=10$,$AQQ_{-1}$加$[-x]$后右移
- 若$Q_0Q_{-1}=01$,$AQQ_{-1}$加$[x]$后右移
- 操作次数等于乘数的数值位数(不包括符号位)
- 最后将$A$和$Q$拼接起来
- 比较Q0和Q(-1),根据结果进行操作:
补码乘法小数位置确定
- 两个n位小数相乘,结果为2n位小数
- 小数点应放在最高位之前
- 结果的精度是原始数精度的两倍
定点除法运算
原码除法运算
恢复余数除法
感觉原码直接打竖式算就可以了
- 对于被除数$x$和除数$y$,分别求$|x|$、$|x|_补$、$|y|_补$、$[-y]_补$
- 用$|x|_补+[-y]_补$,做如下判断
- 若结果为正,商1,左移
- 若结果为负,商0,$+[y]_补$,恢复后左移
- 重复上述操作直到商和机器码长度一致
- 最后的余数要乘以$2^{左移次数}$
补码的除法运算
- 符号位参与运算
- 被除数、除数、余数采用双符号位
运算步骤
- 对于被除数$x$和除数$y$,分别求$|x|$、$|y|_补$、$|-y|_补$
- 首先判被除数($x_补$)与除数($y_补$)是同号还是异号.如果是同号,就要减去($y_补$).如果是异号就要加上($y_补$).
- 算出的余数再与除数($y_补$)进行比较:
- 如果是同号,商上1,向左移动一位,再减去($y_补$),加上($[-y]_补$)
- 如果是异号,商上0,向左移动一位,再加上($y_补$)
- 循环操作第三步直到商的位数和机器码相同
- 补码除法的商最后一位固定设置为1
- 将余数乘以$2^{左移次数}$
浮点数加减法
运算步骤
- 对阶 Alignment
- 将小指数的数向大指数对齐
- 小指数数的尾数右移,每右移一位,指数加1
- 直到两个数的指数相等
- 尾数运算 Mantissa Operation
- 对阶后进行尾数的加减运算
- 注意保持正确的符号
- 规格化 Normalization
- 调整结果使其满足规格化要求
- 通常要求尾数最高位为1
- 可能需要左移或右移尾数
- 舍入 Rounding
- 根据舍入规则处理多余的位
- 溢出检查 Overflow Check
- 检查结果是否超出表示范围
示例 Examples
例1:基本加法 Basic Addition
|
|
例2:异号加法(实质是减法)Subtraction
|
|
特殊情况 Special Cases
-
上溢 Overflow
1 2当结果超过最大可表示范围时发生 例如:1.111×2¹²⁷ + 1.111×2¹²⁷ -
下溢 Underflow
1 2当结果小于最小可表示范围时发生 例如:1.000×2⁻¹²⁶ ÷ 2 -
精度损失 Precision Loss
1 2 3当两个数量级相差很大时: 1.234×2²⁰ + 1.234×2⁻²⁰ 小的数可能完全被忽略
运算方法与运算器
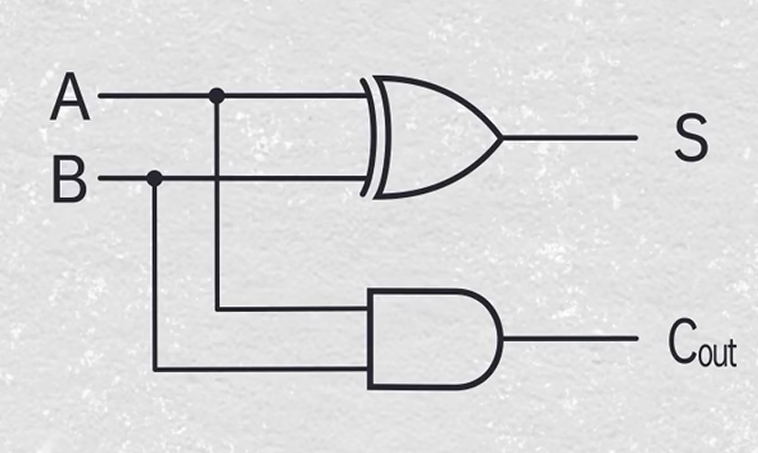
半加法器(Half Adder HA)
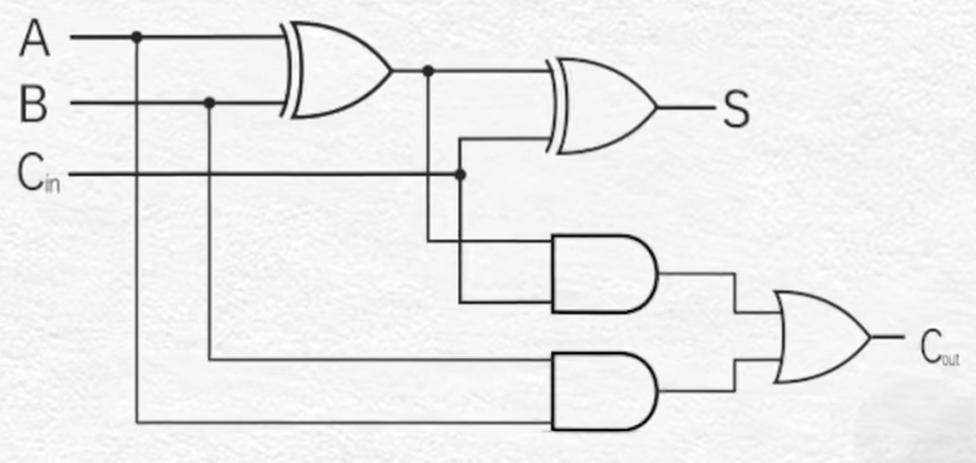
全加法器(Full Adder FA)
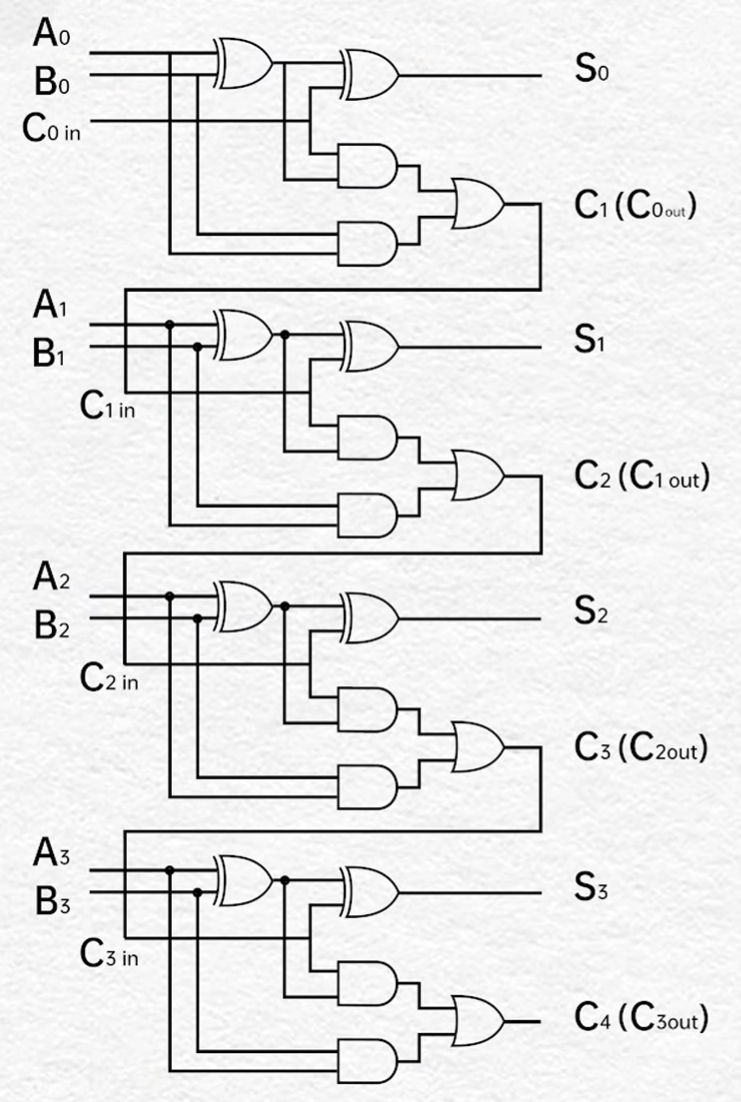
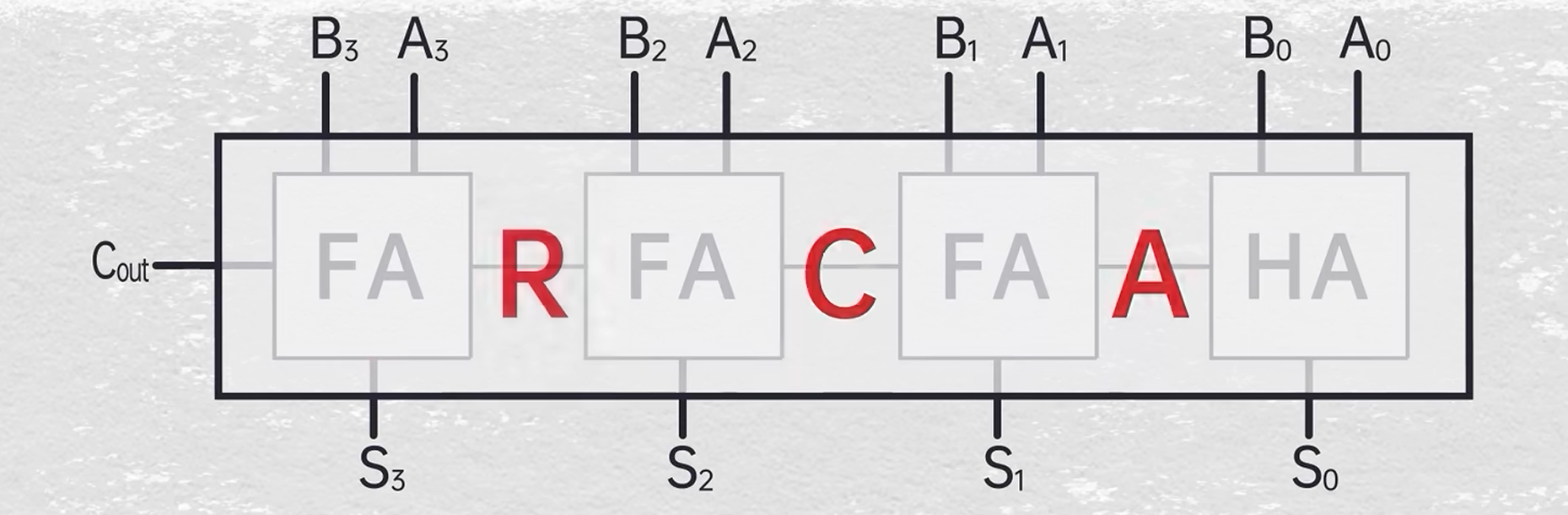
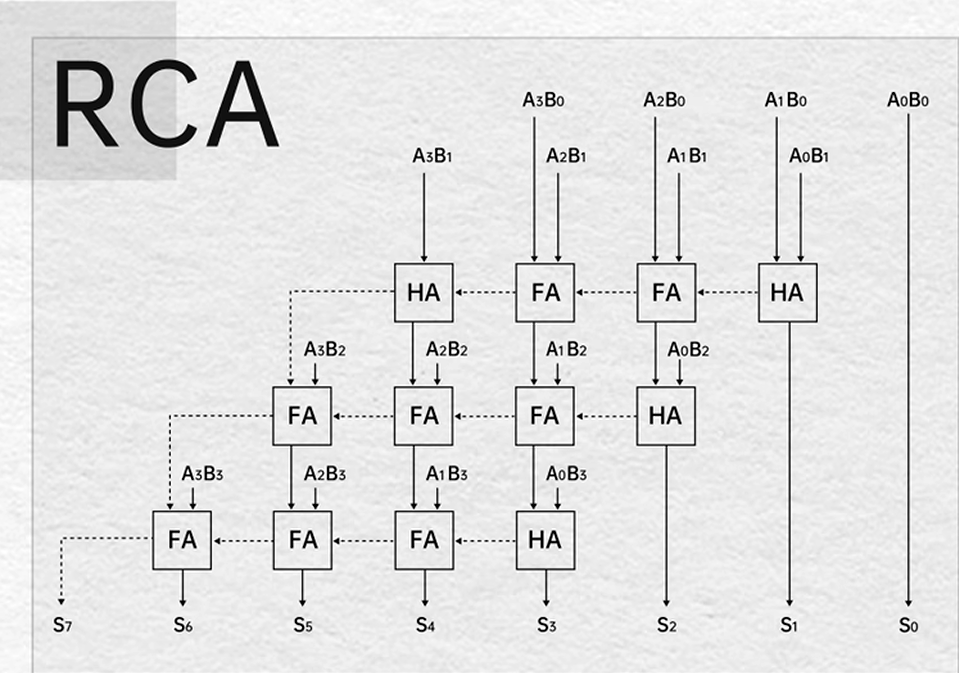
串行进位全加法器
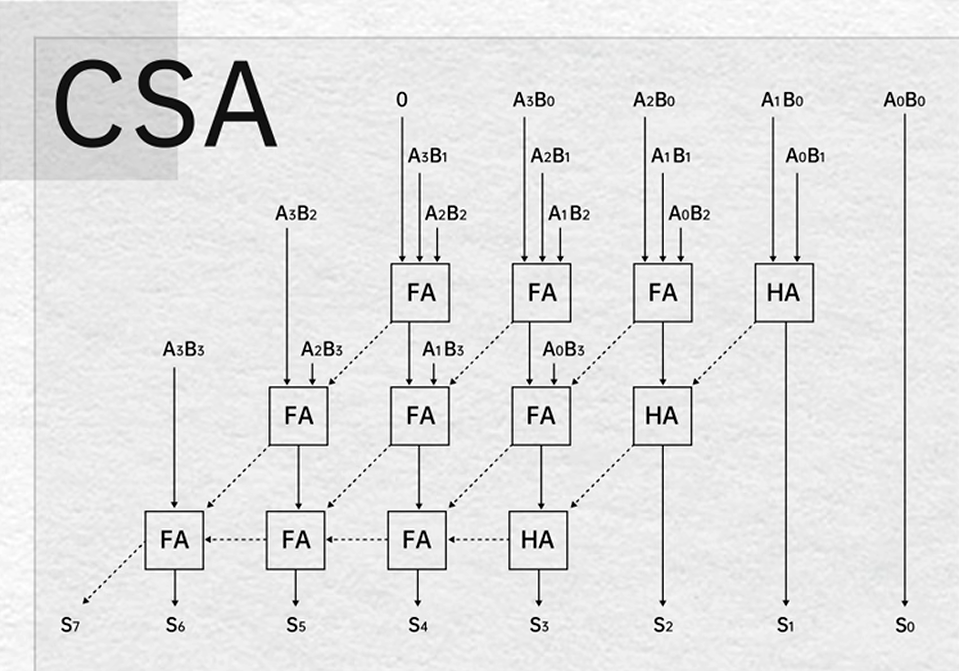
阵列乘法器
第四章 存储系统
存储器基础概念
存储器分类
- 按存储介质:半导体、磁性材料、光、纸
- 按存取方式:
- 随机存储器(RAM):存取时间与物理位置无关
- 顺序存储器:存取时间与物理位置有关(磁盘/光盘/磁带)
- 按读写方式:
- RAM (Random Access Memory)
- ROM (Read Only Memory)
- 按信息保存性:
- 永久性(非易失性):断电不丢失
- 非永久性(易失性):断电丢失
主存技术指标
- 存储容量:存储器所能存储的二进制信息位数
- 存取速度:
- 存取时间:启动存取操作到完成的时间
- 存储周期:连续两次存取操作的最短时间间隔
- 存储器带宽:单位时间内存取的信息位数
大端小端模式
概念
- 大端(big-endian):最高字节地址作为字地址
- 小端(little-endian):最低字节地址作为字地址
- 68000采用大端,Intel采用小端,ARM两者都支持
例题
|
|
半导体存储器
SRAM
基本存储单元结构
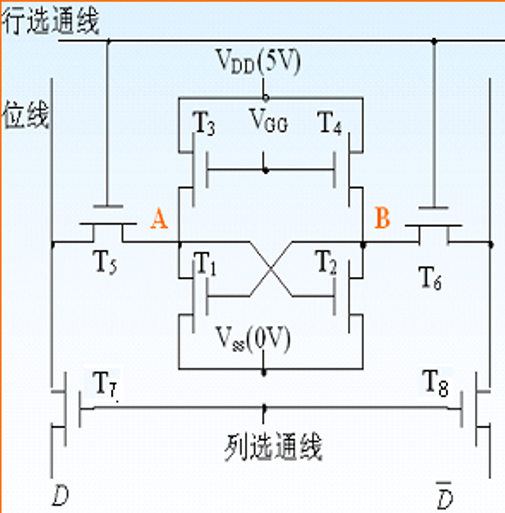
SRAM 的基本存储单元是由六个晶体管构成的双稳态触发器,通常称为"六管SRAM"或"6T SRAM"。
主要组成部分 (Main components):
- 4个NMOS管和2个PMOS管
- 2个交叉耦合的反相器
- 2个访问晶体管(传输管)
- 1个位线对(BL和BLB)
- 1个字线(WL)
工作原理
SRAM的工作原理基于双稳态触发器的特性:
- 双稳态特性 (Bistable characteristic):
- 两个稳定状态:‘0’和'1’
- 只要有电源供应,数据就能稳定保持
- 不需要周期性刷新
- 反相器对 (Inverter pair):
- 两个反相器互连形成正反馈
- 一个节点为高电平时,另一个必为低电平
- 形成自锁回路
读写过程
写操作 (Write Operation):
- 激活字线(WL)
- 在位线对(BL/BLB)上施加互补信号
- 通过访问晶体管强制改变存储节点电平
- 新数据被锁存
读操作 (Read Operation):
- 预充电位线对至高电平
- 激活字线
- 存储单元将数据传递到位线对
- 感测放大器检测位线电压差
- 输出数据
SRAM不需要刷新的原因
SRAM不需要刷新的特点源于其结构特性:
- 持续性供电 (Continuous Power):
- 只要有电源供应,数据就能稳定保持
- 交叉耦合的反相器持续维持状态
- 稳定性 (Stability):
- 正反馈结构保证数据稳定
- 不存在电荷泄漏问题
- 不像DRAM需要定期刷新
DRAM
基本存储单元结构
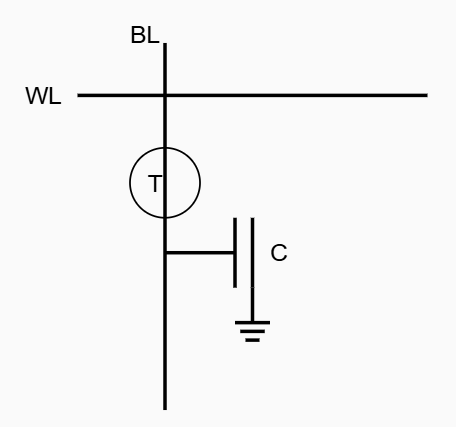
DRAM 的基本存储单元由一个晶体管和一个电容构成,通常称为"1T1C"结构:
工作原理
一个晶体管一个电容
DRAM 的工作原理基于电荷存储:
- 数据存储:
- 1:电容充电(高电平)
- 0:电容放电(低电平)
- 电荷泄漏:
- 电容会随时间缓慢放电
- 需要定期刷新维持数据
读写过程
写操作 (Write Operation):
- 激活字线(WL),打开访问晶体管
- 在位线(BL)上施加数据电平
- 电容充电或放电
- 关闭字线,数据被存储
读操作 (Read Operation):
- 位线预充电至中间电平
- 激活字线,打开访问晶体管
- 电荷共享导致位线电平变化
- 感测放大器检测并放大电平差
- 数据输出并回写(破坏性读出)
刷新操作
刷新周期 (Refresh Cycle)
- 标准刷新周期:2ms
- 在2ms内必须完成所有存储单元的刷新
- 刷新间隔 = 刷新周期 ÷ 行数
|
|
刷新方式
-
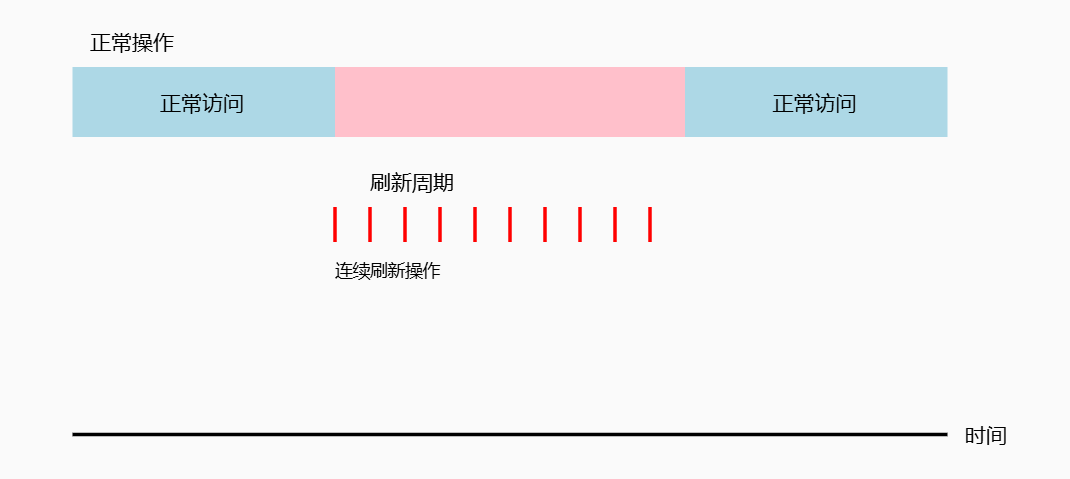
集中刷新 (Burst Refresh)
-
工作原理
在固定的时间段内,连续对所有行进行刷新,期间停止所有正常的存储器访问操作。
-
操作流程
1 2 3 4 5 6 7 8 9 10 11 121. 进入刷新周期: - 停止响应所有存储器访问请求 - 将刷新计数器清零 2. 连续刷新过程: - 选择当前行(由刷新计数器指定) - 执行刷新操作 - 刷新计数器+1 - 重复直到所有行刷新完成 3. 退出刷新周期: - 恢复正常的存储器访问 -
时序图
-
例题
题目: 某DRAM芯片容量为4M×8位,刷新周期要求为4ms,每次刷新操作需要100ns。该DRAM采用集中刷新方式,要求:
- 计算需要多少根地址线
- 计算总的刷新时间
- 计算在刷新期间的存储器利用率损失
- 如果CPU时钟周期为10ns,计算在一个刷新周期内损失的CPU周期数
解答:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 171. 地址线计算: - 总容量 = 4M×8位 = 4194304×8位 - 行地址需要:log₂(√4194304) = 11位 - 列地址需要:log₂(√4194304) = 11位 - 总地址线:11 + 11 = 22根 2. 刷新时间计算: - 行数 = 2¹¹ = 2048行 - 总刷新时间 = 2048行 × 100ns = 204.8μs 3. 存储器利用率损失: - 刷新周期 = 4ms = 4000μs - 利用率损失 = (204.8μs ÷ 4000μs) × 100% = 5.12% 4. 损失的CPU周期: - 刷新时间 = 204.8μs = 204800ns - 损失的CPU周期数 = 204800ns ÷ 10ns = 20480个周期
-
-
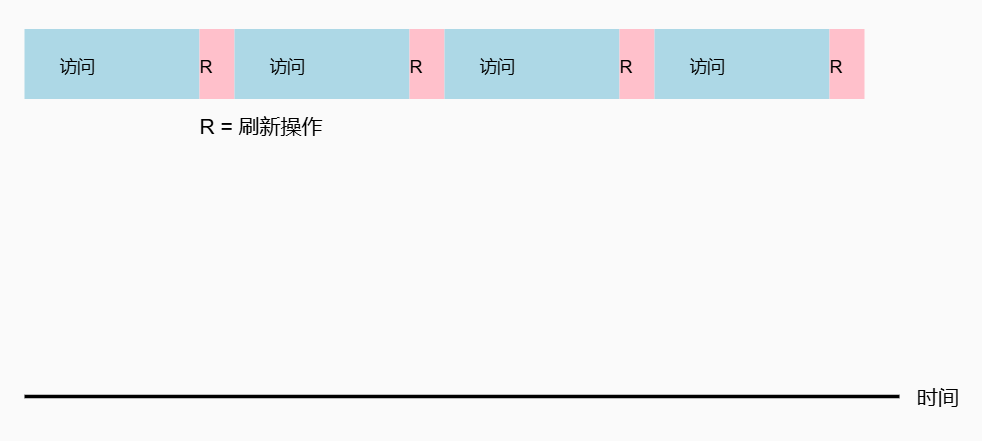
分散刷新 (Distributed Refresh)
-
工作原理
在每个存储器正常访问周期结束后,插入一次刷新操作。
-
操作流程
1 2 3 4 5 6 7 81. 执行正常的存储器访问操作 2. 访问周期结束后: - 执行一次刷新操作(刷新一行) - 刷新计数器+1 - 为下一行刷新做准备 3. 开始下一个访问周期 -
时序图
-
例题
题目: 某DRAM芯片为16M×4位,刷新周期为2ms,采用分散刷新方式。存储器的读写周期为80ns,刷新操作需要100ns。请计算:
- 一个完整的存储器周期时间
- 实际的存储器带宽
- 如果改用集中刷新,两种方式的存储器利用率比较
- 刷新操作的频率
解答:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 231. 存储器周期计算: - 行数 = √(16M) = 4096行 - 每个刷新周期内需要刷新次数 = 4096次 - 每次刷新间隔 = 2ms ÷ 4096 ≈ 488ns - 完整周期 = 80ns(读写) + 100ns(刷新) = 180ns 2. 实际带宽计算: - 理论周期时间 = 80ns - 实际周期时间 = 180ns - 理论带宽 = (4位 ÷ 80ns) = 50MB/s - 实际带宽 = (4位 ÷ 180ns) ≈ 22.22MB/s 3. 刷新方式比较: 分散刷新: - 利用率 = 80ns ÷ 180ns ≈ 44.4% 集中刷新: - 总刷新时间 = 4096 × 100ns = 409.6μs - 利用率 = (2000μs - 409.6μs) ÷ 2000μs ≈ 79.52% 4. 刷新频率: - 每488ns进行一次刷新 - 刷新频率 = 1 ÷ 488ns ≈ 2.049MHz
-
-
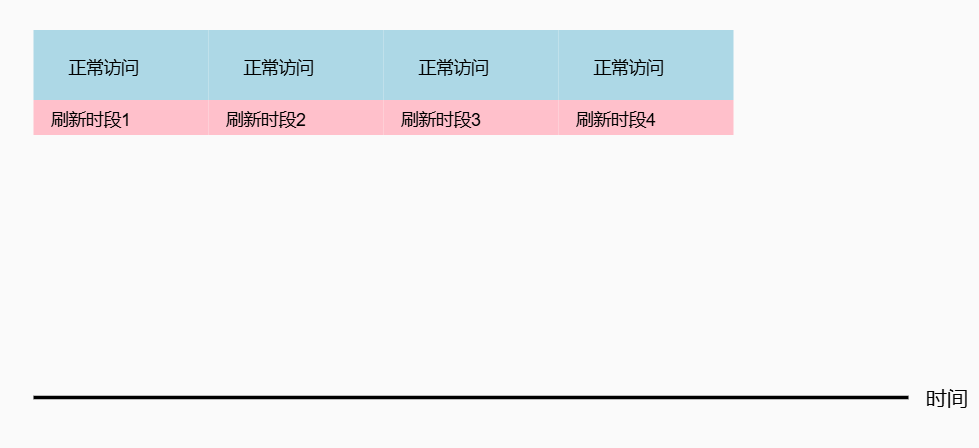
异步刷新 (Asynchronous Refresh)
-
工作原理
将刷新周期分成多个时间片,每个时间片内完成部分行的刷新。
-
操作流程
1 2 3 4 5 6 7 8 9 10 111. 刷新周期分段: - 通常分为8个或16个时间片 - 每个时间片负责特定数量的行刷新 2. 每个时间片内: - 连续刷新分配给该时间片的所有行 - 其他时间用于正常访问 3. 时间片切换: - 完成当前时间片的刷新任务 - 等待下一个时间片 -
时序图
-
异步刷新例题
题目: 某DRAM容量为64M×8位,刷新周期4ms,采用异步刷新方式,将刷新周期分为8个时间片。每次刷新操作需要120ns,普通读写操作需要100ns。请计算:
- 每个时间片的持续时间和需要刷新的行数
- 每个时间片内的存储器利用率
- 如果要求系统响应时间不超过1μs,判断是否满足要求
- 计算平均访问时间
解答:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 191. 时间片计算: - 总行数 = √64M = 8192行 - 每个时间片时长 = 4ms ÷ 8 = 500μs - 每个时间片需刷新行数 = 8192 ÷ 8 = 1024行 - 每个时间片的刷新时间 = 1024 × 120ns = 122.88μs 2. 存储器利用率: - 每个时间片可用时间 = 500μs - 122.88μs = 377.12μs - 单片利用率 = 377.12μs ÷ 500μs ≈ 75.424% 3. 响应时间分析: - 最坏情况:刷新操作正在进行时收到访问请求 - 最大等待时间 = 1024行 × 120ns = 122.88μs - 122.88μs > 1μs,不满足要求 4. 平均访问时间: - 正常访问时间 = 100ns - 刷新影响时间 = (122.88μs ÷ 500μs) × 100ns = 24.576ns - 平均访问时间 = 100ns + 24.576ns = 124.576ns
-
三种方式的比较
| 特性 | 集中刷新 | 分散刷新 | 异步刷新 |
|---|---|---|---|
| 控制复杂度 | 简单 | 复杂 | 中等 |
| 存储器利用率 | 低 | 高 | 中等 |
| 实现难度 | 容易 | 困难 | 中等 |
| 刷新效率 | 高 | 低 | 中等 |
| 对系统影响 | 大 | 小 | 中等 |
主存与CPU的连接
存储器扩展
位扩展 (Bit Extension)
当存储器的数据位宽不足以满足系统需求时,需要进行位扩展。
原理 (Principle)
- 将多个存储器芯片并联,增加数据位宽
- 所有芯片共用相同的地址线和控制线
- 每个芯片负责存储数据的不同位
示例 (Example)
将两个8位宽的存储器芯片组成16位宽的存储器:
- 芯片1:存储D0-D7
- 芯片2:存储D8-D15
- 共用地址线A0-An
- 共用片选信号CS、读写控制信号R/W
字扩展 (Word Extension)
当存储器容量(字数)不足时,需要进行字扩展。
原理 (Principle)
- 将多个存储器芯片串联,增加存储容量
- 所有芯片共用数据线和控制线
- 通过片选信号选择不同的芯片
示例 (Example)
将两个1K×8位的存储器组成2K×8位的存储器:
- 使用A10作为片选信号
- A10=0选择芯片1(地址0-1023)
- A10=1选择芯片2(地址1024-2047)
字位同时扩展 (Word-Bit Simultaneous Extension)
当需要同时扩展数据位宽和存储容量时使用。
原理 (Principle)
- 结合位扩展和字扩展的方法
- 形成一个矩阵式的存储器阵列
- 需要同时考虑数据位的分配和片选逻辑
示例 (Example)
用4个1K×8位的存储器组成2K×16位的存储器:
- 水平方向:位扩展(8位→16位)
- 垂直方向:字扩展(1K→2K)
片选方式 (Chip Selection Methods)
-
线选法 (Linear Selection)
线选法是最简单的片选方式,直接用一根选通线来选中一个存储芯片。每个存储芯片都有独立的片选信号线。
优点:
- 电路简单,容易实现
- 选择速度快
缺点:
- 需要的片选线数量多
- 当存储芯片数量增加时,占用的I/O端口也相应增加
- 扩展能力受限
-
全译码法 (Full Decoding)
全译码法使用地址译码器将n位二进制地址译码成$2^n$个片选信号。
优点:
- 片选线使用效率高
- 每个地址都对应唯一的存储芯片
- 地址空间利用率100%
特点:
- n根地址线可以选择$2^n$个存储芯片
- 需要使用译码器(如74138)
- 地址连续,没有空隙
-
部分译码法 (Partial Decoding)
部分译码法只使用地址的部分位进行译码,一个片选信号可能对应多个地址。
优点:
- 电路比全译码简单
- 需要的译码器更少
- 适合于地址空间不需要完全使用的场合
缺点:
- 地址空间有重复
- 存储器的编址不连续
- 地址空间利用率低
例题
例1(字扩展):用16K8位的芯片,去构造内存64K8,并要完成与CPU的对接,并求出每一个芯片在全局空间中的地址范围。
解答:
-
需要的芯片数量:
164K ÷ 16K = 4片芯片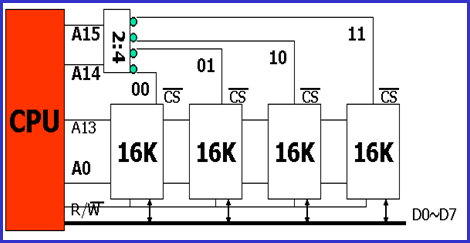
-
地址范围:
- 总地址范围:0000H ~ FFFFH (64K = 2^16)
- 每片芯片负责16K地址空间
- 16K = 16384 = 4000H
地址分配表 / Address Allocation Table
芯片号/No. 地址范围 / Address Range 16进制值/Hex Value A15 A14 A13~A0 0 0 0 0000~3FFF 00000H ~ 03FFFH 1 0 1 0000~3FFF 04000H ~ 07FFFH 2 1 0 0000~3FFF 08000H ~ 0BFFFH 3 1 1 0000~3FFF 0C000H ~ 0FFFFH
解释说明 / Explanation
- 地址线分配 / Address Line Assignment:
- A15, A14:用于片选(选择哪个芯片)
- A13~A0:用于芯片内部寻址(14位)
- 片选逻辑 / Chip Selection Logic:
- 芯片0:当A15=0, A14=0时选中
- 芯片1:当A15=0, A14=1时选中
- 芯片2:当A15=1, A14=0时选中
- 芯片3:当A15=1, A14=1时选中
- 地址范围计算 / Address Range Calculation:
- 每片芯片负责16K (4000H) 的地址空间
- 芯片0:0000H ~ 3FFFH
- 芯片1:4000H ~ 7FFFH
- 芯片2:8000H ~ BFFFH
- 芯片3:C000H ~ FFFFH
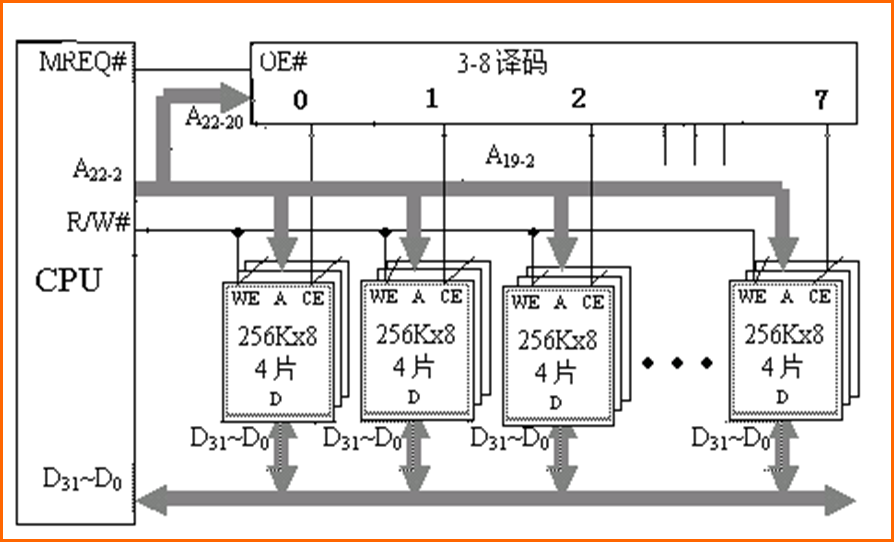
例2(位扩展):用256K ×8位的存储体构造 2M × 32位的存储器,并完成与CPU的连接
-
先用4片256K X 8位的存储体构成 256K X 32的存储体
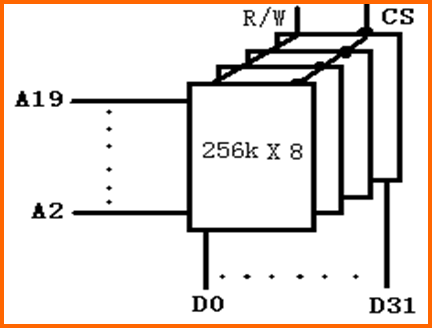
-
然后和字扩展一样
Cache
工作原理 / How Cache Works
- 数据存储:
- Cache将最常用的数据从主存复制到高速缓存中
- 按照块(Block)或行(Line)为单位进行存储
- 访问过程:
- CPU首先查找数据是否在Cache中(Cache命中)
- 如果命中(Hit),直接从Cache读取
- 如果未命中(Miss),从主存读取并放入Cache
- 替换策略:
- 当Cache满时,需要决定替换哪些数据
- 常见策略包括LRU(最近最少使用)、FIFO(先进先出)等
局局部性原理 / Principle of Locality
-
时间局部性 / Temporal Locality
- 定义:如果一个数据被访问,那么在近期它很可能再次被访问
- 例子:
- 循环中的变量
- 频繁调用的函数
- 计数器
1 2 3for(int i = 0; i < 100; i++) { // i具有很好的时间局部性 sum += array[i]; } -
空间局部性 / Spatial Locality
- 定义:如果一个数据被访问,那么它周围的数据很可能也会被访问
- 例子:
- 数组的连续访问
- 顺序执行的指令
- 结构体中的相邻成员
1 2 3 4int array[100]; for(int i = 0; i < 100; i++) { array[i] = i; // 数组连续访问体现了空间局部性 }
局部性原理的重要性 / Importance of Locality
- 性能优化:
- 利用局部性原理可以提高Cache命中率
- 减少主存访问次数,提升系统性能
- 程序设计:
- 影响程序编写方式
- 引导更好的数据结构和算法选择
实际应用示例 / Practical Example
|
|
这个例子展示了如何通过合适的访问模式来利用空间局部性,提高程序性能。第一种方式(按行访问)能更好地利用Cache的特性,而第二种方式(按列访问)会导致更多的Cache未命中。
存储器映射方式 Memory Mapping Methods
-
直接映射 (Direct Mapping)
-
基本概念
直接映射是最简单的映射方式,主存中的每个块只能映射到Cache中的一个特定位置。
-
地址结构
主存地址分为三个字段:
- 标记(Tag):用于识别是否是所需的块
- 组号/行号(Line):确定Cache中的位置
- 块内地址(Block Offset):确定块内的具体单元
-
例题 Example
假设有一个存储系统具有以下参数:
- 主存容量:1024KB = 2^20 B
- Cache容量:16KB = 2^14 B
- 块大小:64B = 2^6 B
解答:
- 计算地址位数:
- 主存地址位数 = log2(1024×1024) = 20位
- 计算各字段位数:
- 块内地址:log2(64) = 6位
- Cache行数:16KB/64B = 256行,所以行号需要8位
- 标记位:20 - 8 - 6 = 6位
- 地址格式:
1| 标记(6位) | 行号(8位) | 块内地址(6位) |
-
-
全相联映射 (Fully Associative Mapping)
-
基本概念 Basic Concept
主存中的任何一块可以映射到Cache中的任何位置。需要并行对比所有Cache行。
-
地址结构 Address Structure
主存地址分为两个字段:
- 标记(Tag)
- 块内地址(Block Offset)
-
例题 Example
使用上述相同参数,求地址格式。
解答
1. 块内地址:同样是6位 2. 标记位: - 不需要行号字段 - 标记位 = 20 - 6 = 14位 3. 地址格式: ``` | 标记(14位) | 块内地址(6位) | ```
-
-
组相联映射 (Set Associative Mapping)
-
基本概念 Basic Concept
是直接映射和全相联映射的折中方案。Cache分成若干组,每组包含n个行(n路组相联)。
-
地址结构 Address Structure
主存地址分为三个字段:
- 标记(Tag)
- 组号(Set)
- 块内地址(Block Offset)
-
例题 Example
假设采用4路组相联,其他参数同上。
解答:
1. 计算组数: - 总行数 = 256行 - 每组4行 - 组数 = 256/4 = 64组 2. 计算各字段位数: - 块内地址:6位 - 组号:log2(64) = 6位 - 标记位:20 - 6 - 6 = 8位 3. 地址格式: ``` | 标记(8位) | 组号(6位) | 块内地址(6位) | ```
-
性能比较 Performance Comparison
- 命中率 Hit Rate:
- 全相联 > 组相联 > 直接映射
- 硬件复杂度 Hardware Complexity:
- 直接映射 < 组相联 < 全相联
- 查找速度 Search Speed:
- 直接映射 > 组相联 > 全相联
综合例题 Comprehensive Example
假设主存地址为32位,Cache大小为64KB,块大小为32B,采用8路组相联映射,求:
- 地址格式
- Cache总行数
- 每组行数
- 组数
- 标记位、组号位、块内地址位的位数
解答 Solution:
- Cache总行数:
- 64KB/32B = 2048行
- 每组行数:
- 8行(8路组相联)
- 组数:
- 2048/8 = 256组
- 地址位的分配:
- 块内地址:log2(32) = 5位
- 组号:log2(256) = 8位
- 标记:32 - 8 - 5 = 19位
- 地址格式:
|
|
替换算法
LRU
-
工作原理
- 替换最长时间没有被访问的数据块
- 需要记录每个数据块的最后访问时间
- 基于程序的时间局部性原理
-
实现方式
- 计数器法:记录上次访问时间
- 栈实现:最近使用的放栈顶
- 链表实现:访问后移至表头
-
例题
假设有一个容量为 3 的 Cache,访问序列为:1, 2, 3, 4, 1, 2, 5, 1, 2, 3
1 2 3 4 5 6 7 8初始状态:[ ][ ][ ] 1 访问 → [1][ ][ ] 2 访问 → [2][1][ ] 3 访问 → [3][2][1] 4 访问 → [4][3][2] (替换最久未使用的1) 1 访问 → [1][4][3] (替换最久未使用的2) 2 访问 → [2][1][4] (替换最久未使用的3) 5 访问 → [5][2][1] (替换最久未使用的4)
LFU
-
工作原理
- 替换访问次数最少的数据块
- 需要维护访问计数器
- 基于使用频率进行判断
-
例题
假设有一个容量为 3 的 Cache,访问序列为:1, 1, 1, 2, 2, 3, 4, 1
1 2 3 4 5 6 7 8初始状态:[ ][ ][ ] 1 访问 → [1:1][ ][ ] (数字:计数) 1 访问 → [1:2][ ][ ] 1 访问 → [1:3][ ][ ] 2 访问 → [1:3][2:1][ ] 2 访问 → [1:3][2:2][ ] 3 访问 → [1:3][2:2][3:1] 4 访问 → [1:3][2:2][4:1] (替换计数最小的3)
FIFO
-
工作原理
- 替换最早进入 Cache 的数据块
- 类似队列操作
- 实现简单,硬件开销小
-
例题
假设有一个容量为 3 的 Cache,访问序列为:1, 2, 3, 4, 2, 1, 5
1 2 3 4 5 6 7 8初始状态:[ ][ ][ ] 1 进入 → [1][ ][ ] 2 进入 → [1][2][ ] 3 进入 → [1][2][3] 4 进入 → [4][2][3] (替换最早进入的1) 2 访问 → [4][2][3] (已存在,不变) 1 进入 → [4][2][1] (替换最早进入的3) 5 进入 → [4][5][1] (替换最早进入的2)
随机替换
-
工作原理
- 随机选择要替换的数据块
- 不需要维护任何历史信息
- 硬件实现最简单
-
例题
假设有一个容量为 3 的 Cache,访问序列为:1, 2, 3, 4, 2, 1, 5
- 过程演示 (Process Demonstration)
1 2 3 4 5 6 7 8初始状态:[ ][ ][ ] 1 进入 → [1][ ][ ] 2 进入 → [1][2][ ] 3 进入 → [1][2][3] 4 进入 → [4][2][3] (随机替换了1) 2 访问 → [4][2][3] (已存在,不变) 1 进入 → [4][1][3] (随机替换了2) 5 进入 → [4][1][5] (随机替换了3)
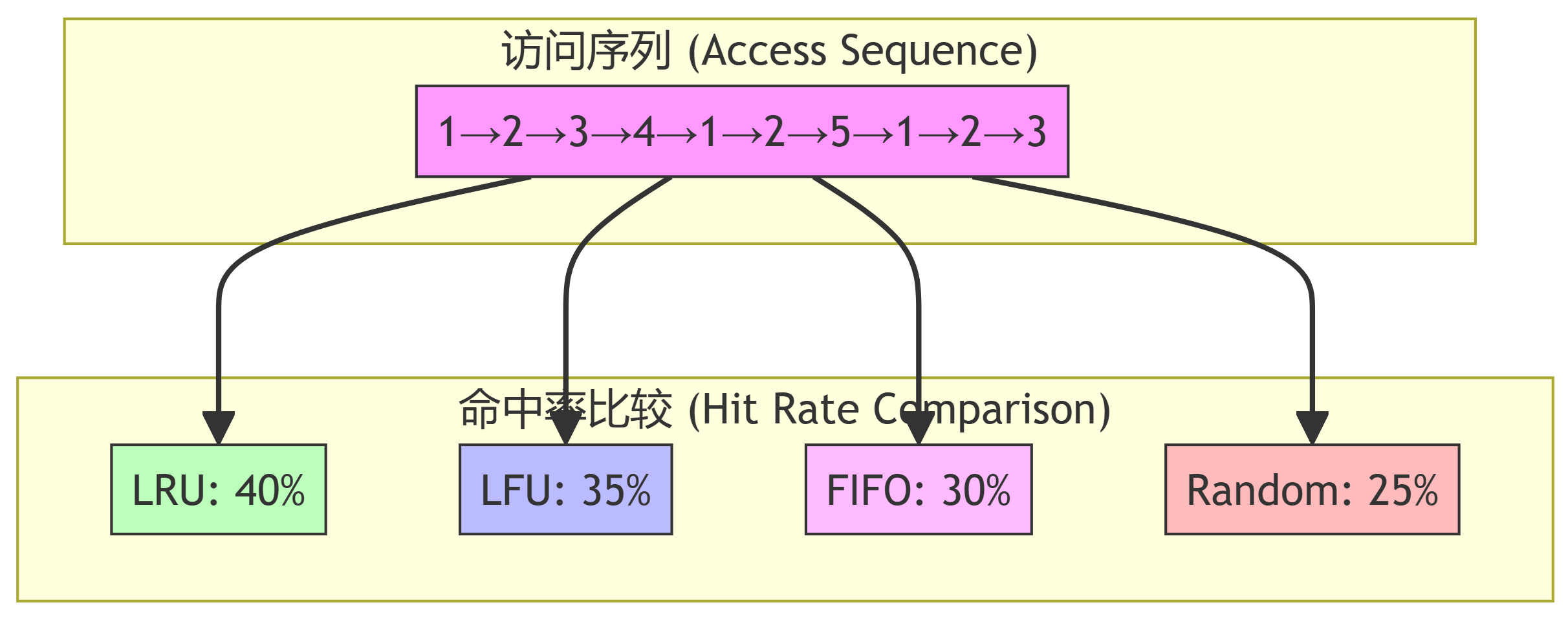
性能比较
写策略
写直达法(Write Through)
- 数据同时写入 Cache 和主存
- 每次写操作都要访问主存
- Cache 和主存的数据始终保持一致
写回法(Write Back)
- 写操作只修改 Cache 中的数据
- 被修改的数据块被标记为"脏"(dirty)
- 当脏块被替换时,才写回主存
性能计算
命中率计算
在一个程序执行期间,设$N_c$表示Cache完成存取的总次数,$N_m$表示主存完成存取的总次数,h定义为命中率,则有
$$ h=\frac{N_c}{N_c+N_m} $$平均访问时间计算
若$t_c$表示命中时的Cache访问时间,$t_m$表示未命中时的主存访问时间,$1-h$表示未命中率,则Cache/主存系统的平均访问时间$t_a$为
$$ t_a=h\cdot t_c+(1-h)t_m $$Cache效率计算
设$r=\frac{tm}{tc}$表示主存慢于Cache的倍率,e表示访问效率,则有:
$$ e = \frac{t_c}{t_a} = \frac{t_c}{ht_c + (1-h)t_m} = \frac{1}{r + (1-r)h} = \frac{1}{h + (1-h)r} $$